Masters Physics Project
At the end of the first semester of my Masters course (MSComp Computer Science - Game Engineering 4th year) I was tasked with building a the physics component of a 3D game, with the goal of implementing as many features covered during teaching, and any additional features, as I could.
I received 86% (first class) for this submission.
Teaching Section
During the teaching section of this topic we followed several tutorials provided by the lecturers, covering topics including: raycasting, linear/angular motion, collision detection/resolution, constraints, spacial accellerators (mainly quadtrees and octrees), AI techniques (state machines, behaviour trees, and pushdown automata), A* pathfinding, and networking.
I was able to implement something for most topics covered in the tutorial, though I was unable to get networking in. This was mainly because, while I did complete the tutorial, I decided setting up the networking system to work with game objects would have taken too long, and there was a good chance I wouldn't have even finished it with the time I had when I got around to it. As such I chose to focus on other areas such as optimising the quadtree.
Specification
For this project we were given two weeks to complete the framework for a simple game with a coherant game loop. We were given the theme of Goat Simulator for part A of the spec, and Untitled Goose Game for part B.
The initial code base we were provided with handled all of the rendering for us, and contained a simple scene with various objects (spheres, cubes, as well as a human model and a goose). We also had access to a simple debug system for displaying text and world-space lines on screen. While we were allowed to use our own assets to make the game look nicer, there was no benifit (having already done a graphics module), so my focus was entirely on the physics for this project.
Features
This section will cover the features as they are in the final product, and will not discuss the tutorials or anything I didn't manage to implement in detail.
Features are roughly in the order they were implemented.
Raycasting
The first tutorial we were given covered raycasting (not to be confused with ray-tracing), a basic collision detection technique which attempts to find any (or all) objects which collide with a line. Before creating a player object this was useful for drawing a line from the camera to the first viewed object, and applying collision to the point on that object being viewed. This allowed for easy testing of some collision detection/resolution algorithms.
The final game uses raycasting as part of the AI, to determine if the enemy goose can see the player. I will go into more detail on this in the AI section.
I later optimised raycasting with a quadtree (which I will go into more detail about below).
Motion
Linear motion is handled using Semi-Implicit Euler integration, in which the velocity of an object is updated each frame by the integral of the accelleration (accel \* time since last frame), and then the integral of the updated velocity is used to update the position.
For angular motion the same technique is used to create a torque (force) and an angular velocity to update the rotation of the object.
The player in this game controls like a car, with the character accellerating towards it's facing direction by applying a fixed force. Upon jumping, a random torque is applied to give the player a wonky spin (since this is clearly how real goats act).
Collision Detection/Resolution
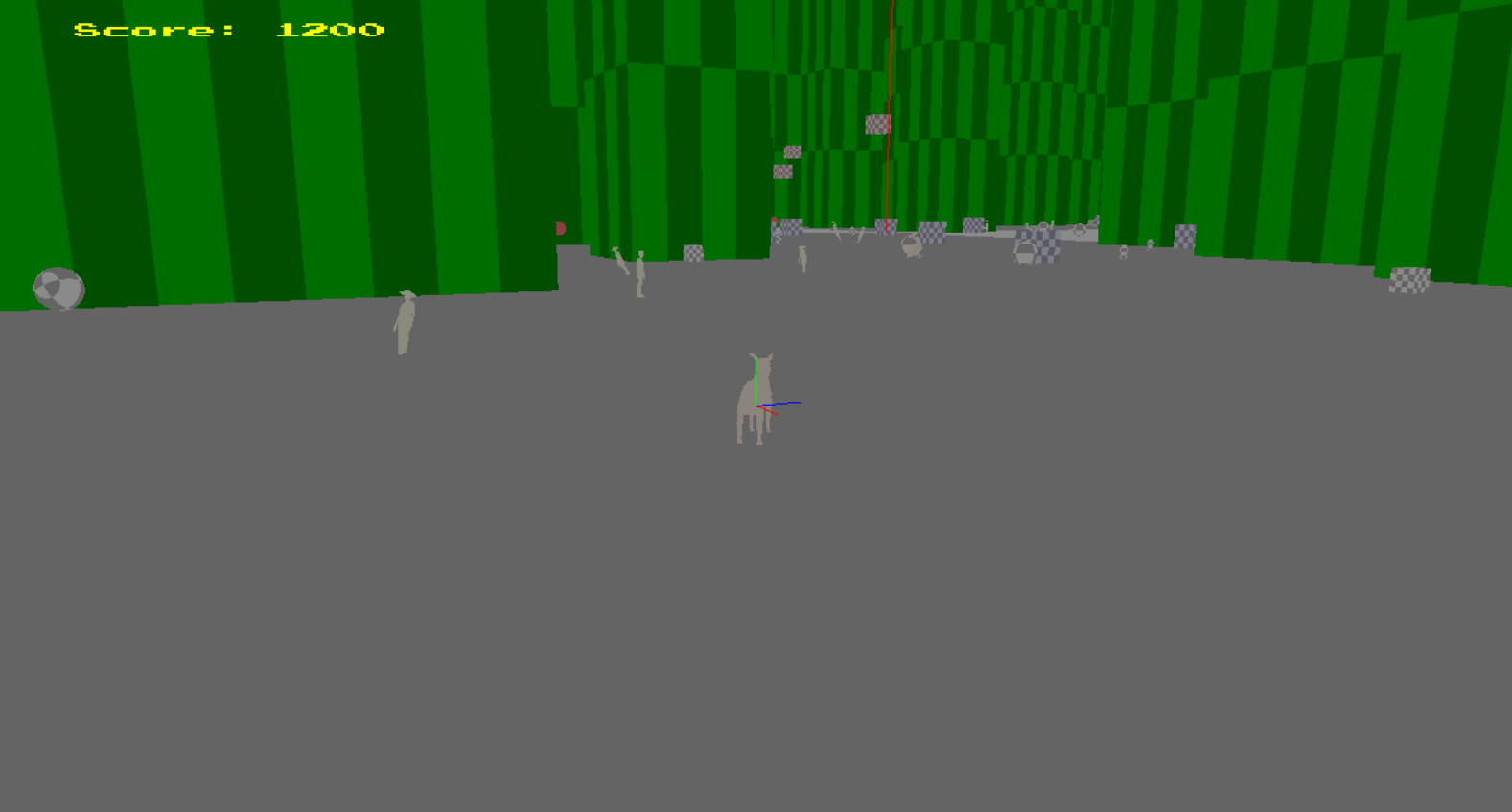
The final game contains several objects scattered around a randomly generated maze. Collision detection is handled for the following volume types:
- Ray
- Sphere
- Capsule
- AABB (Axis Aligned Bounding Box)
- OBB (Object Oriented Bounding Box)
OBB-OBB and OBB-AABB collision detection is handled using separating axis theorems (though I was unable to figure out how to calculate the correct contact points in time, so collision resolution is incorrect for this).
Collision resolution is handled by calculating the impulse based on a single contact point determined during collision detection.
Aside from normal detection/resolution, there are also two additional object types; those being static objects, and trigger volumes. Static objects are treated as having infinite mass (0 inverse mass) and are kept in a separate accelleration structure to dynamic objects (see the quadtree section). Trigger volumes have no collision response associated with them, and call separate on-trigger events (rather than on-collision events) when triggered.
A trigger volume is used on the player character to determine whether or not they are touching the ground, thus allowing for different states of movement, and preventing the player from jumping in mid-air.
Shown above is a test scene containing all collision volumes. Red cubes are static, and blue cubes are axis aligned.
Quadtree
The spacial acceleration structure I chose for this project was a quadtree. I chose a quadtree over an octree because I expected very few objects to overlap on the y-axis at a time.
The quadtree uses an object pool for it's entries, storing an array of the maximum number of entries it will ever need for it's given depth (which I have set to seven for this project). This allows for faster iteration over it's contents, since it will better support CPU caching.
In the game world is quadtrees: one for static objects and one for dynamic objects. The dynamic tree is cleared and re-generated every frame, to update it's contents with changes in object positions. On the other hand, the static tree is only ever updated when needed (when a static object is created/destroyed/moved).
Raycasting uses the quadtree to filter which objects a ray might be able to cast onto.
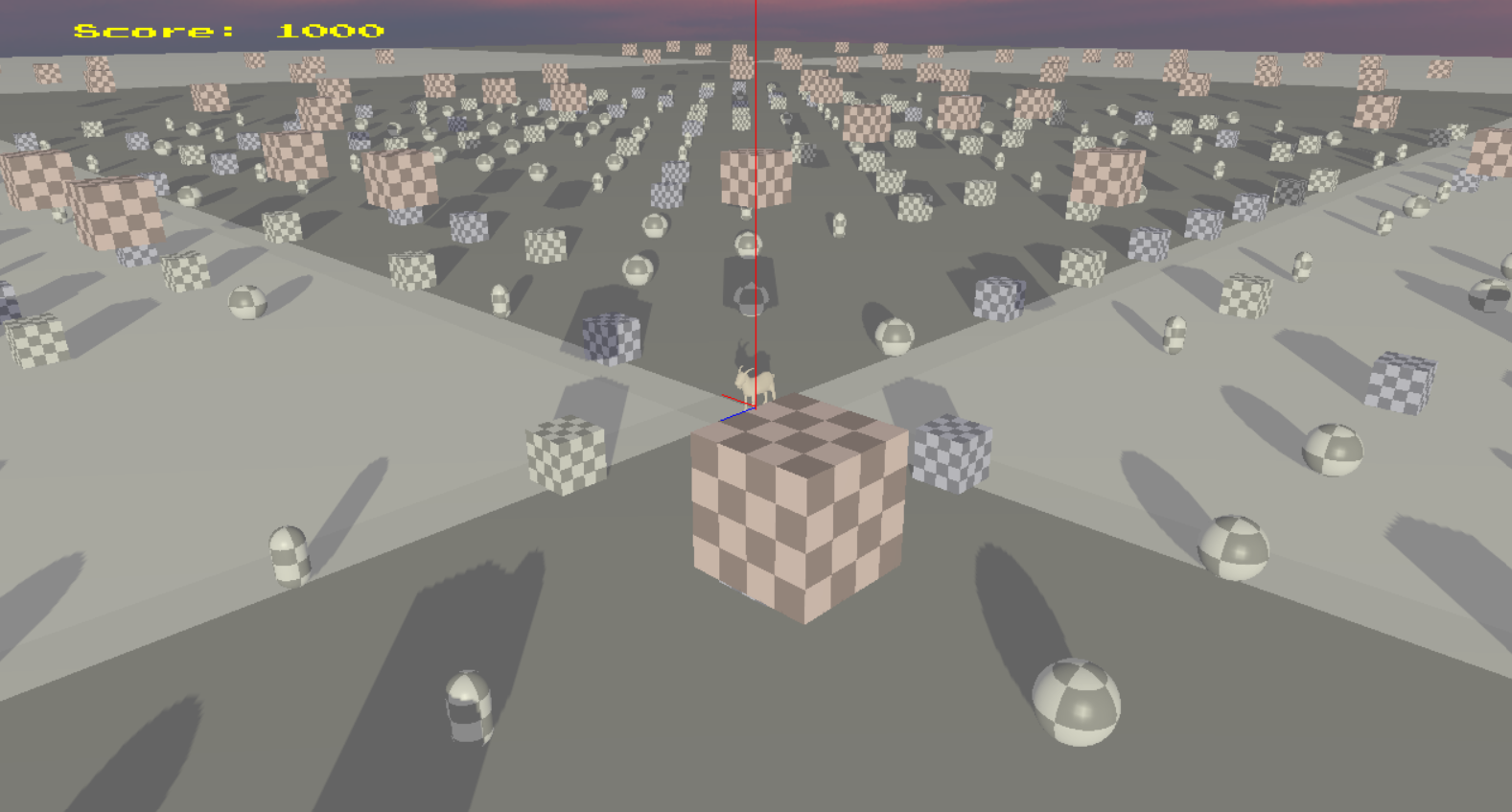
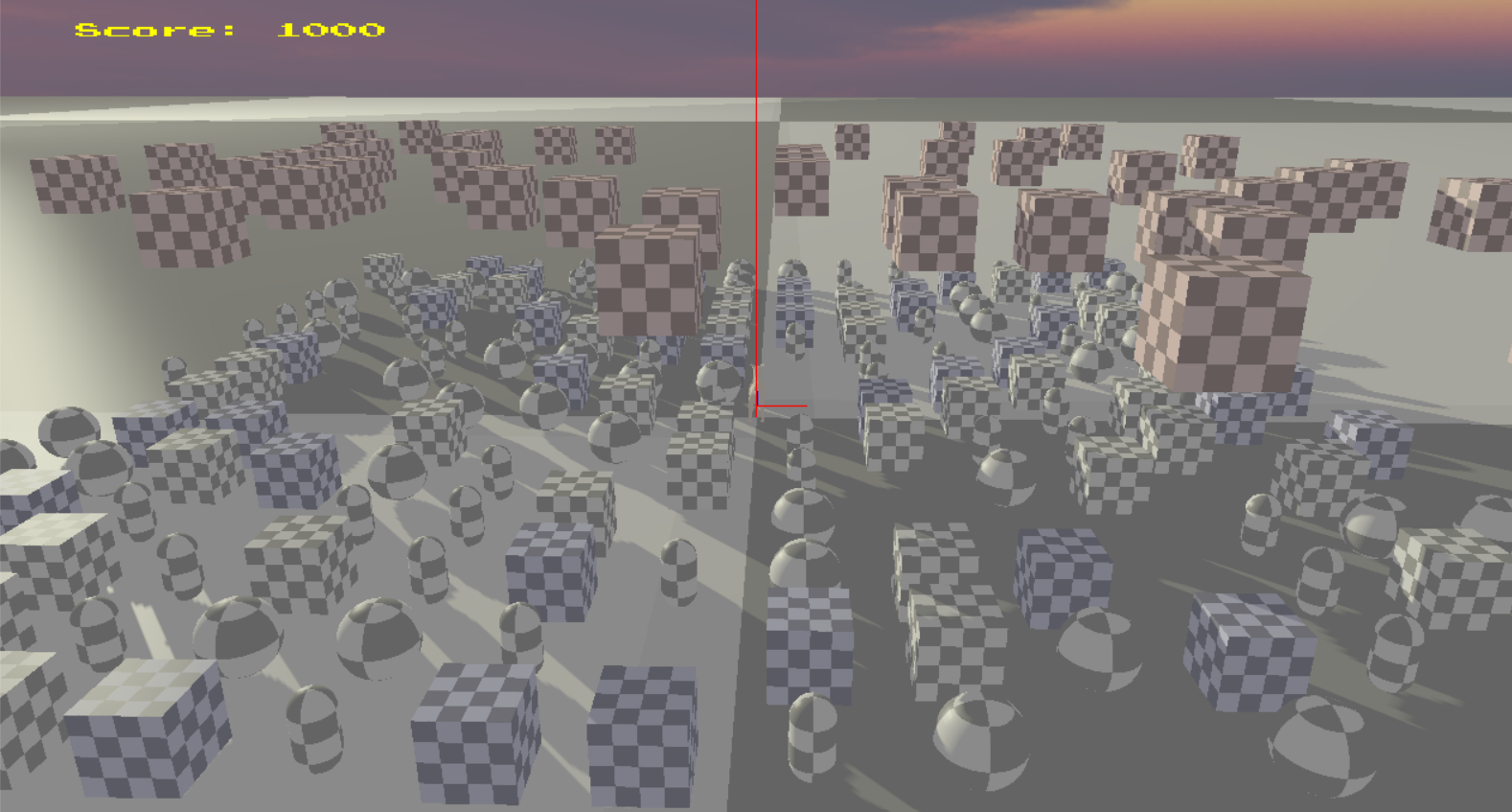
Shown above is a larger test scene used to determine the performance improvements of using the quadtree. There are a total of 900 objects scattered around, and the performance remains at 60fps (on the University PCs). Without the quadtree enabled this scene becomes much slower.
AI
My project makes use of all three AI types covered in the tutorials as well as A* pathfinding:
State Machines (NPC)
The NPCs use simple state machines to determine if the player or the goose is nearby. If they are nearby, the NPC will run in the opposite direction, otherwise they will perform a random walk (simply walking in a slightly varying direction). A spherical trigger volume is used to detect nearby 'objects of fear'.

Pushdown Automata (Enemy)
The enemy (goose) uses a pushdown automata for it's behaviour, structured as follows:
- Patrol - By default the enemy will wander to random points in the maze (using A* to find it's way around).
- Chase - If the player is within sight of the enemy (determined using raycasting), then it will chase after until it loses sight or becomes dazed.
- Dazed - If the enemy is struck by the player's laser eyes it will become dazed for a short time, then return to what it was doing before.

Behaviour Trees (Player Controller)
The player controller uses a behaviour tree to control state and determine valid input actions.
The player will always be able to shoot their laser eyes and grapple things with their tounge. This event is part of the root parallel node.
A selector node is used to switch between actions the player can take when grounded, and actions for when airborne. When grounded, the player is able to run and jump. When airborne, the player can give no inputs, other than the actions mentioned above.
A* Pathfinding
The enemy makes use of A* pathfinding during it's patrol action to find it's way around the randomly generated maze. A navgrid is generated to match the maze and used to select a valid point on the map to patrol to, then generate a list of waypoints for the enemy to follow. When the enemy gets within a certain radius of each waypoint it will switch to the next one until it reaches it's destination (at which point it selects another random destination).